Medición de la estelas turbulenta de turbinas eólicas utilizando aeronaves no tripuladas en un parque eólico en Dinamarca.

Antecedentes
La Universidad de Aalborg, Dinamarca, está participando en un proyecto de investigación sobre cómo transportar piezas de repuesto a turbinas eólicas en alta mar utilizando aeronaves no tripuladas directamente desde el puerto de servicio hasta la góndola de la turbina eólica. Si tiene éxito, el nuevo sistema reemplazaría el transporte de piezas en barco que es un sistema lento y complejo para llevar las piezas a la góndola. El objetivo es reducir en gran medida los costes y las interrupciones en el funcionamiento de la turbina eólica.
Ya que obviamente las turbinas eólicas suelen instalarse donde hace viento, y dado que lo idóneo es que el suministro de piezas de repuestos se haga sin detener la turbina, nos enfrentamos a numerosos retos. La Universidad de Aalborg recurrió a FT para poder a evaluar si es seguro utilizar drones directamente sobre la góndola mientras las palas continúan girando, incluso en condiciones de fuertes vientos y turbulencias.
Proyecto
Para determinar las condiciones del viento justo donde se encuentra la aeronave no tripulada, la Universidad de Aalborg adquirió un sensor FT742-SM y lo montó primero en un dron «más pequeño», un DJI Matrice 600 y luego en la aeronave que realizará entregas de prueba durante el proyecto de investigación, un dron del tipo helicóptero de 90 kg.
El dron M600 se utilizó originalmente por dos razones. Al principio no sabiamos exactamente que iva a pasar al volar unos metros sobre la góndola de una turbina eólica de 6 MW y 100 m de altura, 5 metros detrás de las palas giratorias con unas velocidades de viento superiores a 20 m/s. Así que los investigadores decidieron utilizar un dron de bajo coste. Además, gracias a la configuración multirotor pudimos montar el sensor de viento por encima de la estela del rotor, que de otro modo habría afectado a las mediciones del viento. El sensor se colocó en una varilla de aluminio de 50 cm de largo y luego se acercó poco a poco a la góndola para ver los resultados.
En el vídeo se puede ver:
Arriba a la izquierda: El comportamiento de la aeronave.
Arriba a la derecha: La diferencia en la actuación del motor delantero/trasero y los motores izquierdo/derecho en el dron.
Abajo a la izquierda:La velocidad del viento medida por el FT742-SM en m/s (azul) y la dirección (violeta). El rojo muestra la velocidad del viento a nivel del suelo, pero estos datos se perdieron para este vuelo.
Abajo a la derecha:La fuerza del campo magnético en relación con el campo magnético nominal (línea horizontal discontinua).
La parte más intersante del vídeo son los minutos 7 al 9 del vuelo. Los rápidos cambios en la velocidad del viento muestran las sombras de las palas de la turbina eólica cuando pasan frente al dron.
A continuación, colocamos el sensor de viento FT742-SM en la aeronave T50 boca abajo debajo del fuselaje. Para garantizar que el sensor pudiera proporcionar datos útiles en esta posición, se realizaron varios vuelos en diferentes condiciones de viento.

Los datos que aparecen en los siguientes gráficos son de un vuelo con viento bastante intenso que se midió a una media de unos 8 m/s a nivel del suelo. Ya que era difícil determinar hasta qué punto el sensor de viento estaba midiendo el viento en el entorno en lugar de únicamente la turbulencia del rotor de la aeronave, la aeronave estaba en vuelo estacionario (es decir, manteniendo la posición) y se cambió el rumbo varias veces. Si la dirección del viento que se midió fuera más o menos estable y tuviera relación con el rumbo de la aeronave, lo más probable es que también se pueda confiar en la velocidad del viento medida. En el gráfico de la izquierda se puede ver el rumbo de la brújula de la aeronave en comparación con la dirección del viento medida que utiliza el sensor FT. En el gráfico de la derecha se puede ver la velocidad del viento medida relacionada. Ya que la correlación era bastante similar, también se llegó a la conclusión de que la lectura de la velocidad del viento era lo suficientemente precisa. 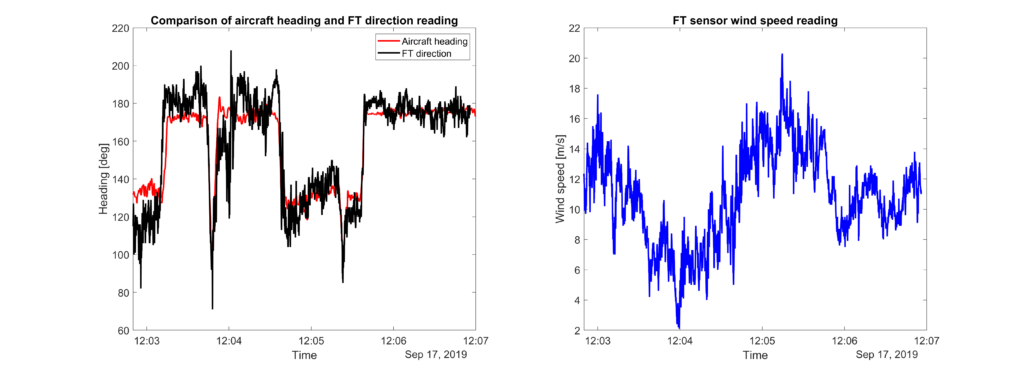
En el siguiente vídeo se puede ver el vuelo desde una cámara de seguimiento a nivel del suelo. Los datos que aparecen en los gráficos anteriores comienzan en la hora de vídeo 4:07. El cambio importante en la dirección a las 12.03.50 en el gráfico aparece en el vídeo a las 5:05.
Conclusión
«El FT742-SM ha sido útil en la toma de mediciones del viento, incluso cuando se encuentra debajo la aeronave no tripulada de mayor tamaño. Tenemos previsto continuar usando el sensor para determinar la velocidad y la dirección del viento durante vuelos futuros, sobre todo en vuelos más largos más allá del campo visual donde es importante no exceder las especificaciones de la aeronave cuando se utiliza con fuertes vientos».
Anders la Cour-Harbo
Profesor adjunto, máster en matemáticas, doctorado en administración, Laboratorio de investigación de drones
Universidad de Aalborg (AAU)
Dinamarca